
摘要:安装过程中,因为首次使用仓库,所以会先导入仓库的公钥程序安装方式程序安装方式程序安装方式配置定义变量添加获取公钥更新软件包安装用于硬件加速推流和推流控制。安装过程中,因为首次使用仓库,所以会先导入仓库的公钥。
软件支持
arch/paltformarm64amd64x86_64i386Ubuntu20.04LTSFocal支持支持支持不支持Ubuntu18.04LTSBionic支持支持支持不支持centos7支持支持支持不支持centos8支持支持支持不支持1、下载ubox.repo到/etc/yum.repos.d
curl -sL https://ubox-repo.ucloud.cn/repos/rpm/7/ubox.repo | sudo tee /etc/yum.repos.d/ubox.repoubox.repo的md5值为 7143e9bad3423a4363e91962193a39d7 可输入 md5sum ubox.repo 进行验证
2、安装epel源
yum install epel-release3、安装rpmfusion源 (国内、国外选其一即可)
(1)国内源利用脚本下载安装(下载较快)
*下载脚本
wget https://github.com/ucloud/ubox-publisher/raw/master/util/add_rpmfusion_cn_mirror.sh*为脚本添加执行权限
chmod +x add_rpmfusion_cn_mirror.sh*执行脚本
./add_rpmfusion_cn_mirror.sh(2)国外源直接下载安装(下载较慢)
yum localinstall --nogpgcheck https://download1.rpmfusion.org/free/el/rpmfusion-free-release-8.noarch.rpm4、安装 ubox-videocontroller
yum install ubox-videocontroller用于硬件加速、RTMP推流和推流控制。安装过程中,因为首次使用ubox仓库,所以yum会先导入ubox仓库的公钥
1、下载ubox.repo到/etc/yum.repos.d
curl -sL https://ubox-repo.ucloud.cn/repos/rpm/7/ubox.repo | sudo tee /etc/yum.repos.d/ubox.repoubox.repo的md5值为 7143e9bad3423a4363e91962193a39d7 可输入 md5sum ubox.repo 进行验证
2、安装epel源
dnf install epel-release3、安装rpmfusion源 (国内、国外选其一即可)
(1)国内利用脚本下载安装(下载较快)
*下载脚本
wget https://github.com/ucloud/ubox-publisher/raw/master/util/add_rpmfusion_cn_mirror.sh*为脚本添加执行权限
chmod +x add_rpmfusion_cn_mirror.sh*执行脚本
./add_rpmfusion_cn_mirror.sh(2)国外直接下载安装(下载较慢)
dnf localinstall --nogpgcheck https://download1.rpmfusion.org/free/el/rpmfusion-free-release-8.noarch.rpm4、安装 ubox-videocontroller
dnf install ubox-videocontroller用于硬件加速、RTMP推流和推流控制。安装过程中,因为首次使用ubox仓库,所以dnf会先导入ubox仓库的公钥
1、配置sources
*定义REPO变量
REPO=$(lsb_release -cs) *添加ubox.list
echo "deb http://ubox-deb.ucloud.cn/repos/deb/all $REPO ubox" | sudo tee /etc/apt/sources.list.d/ubox.list2、获取公钥
curl -sL http://ubox-deb.ucloud.cn/DEB-GPG-KEY-ubox | gpg --dearmor | sudo tee /etc/apt/trusted.gpg.d/ubox.gpg3、更新软件包
sudo apt-get update4、安装 ubox-videocontroller
sudo apt-get install ubox-videocontroller用于硬件加速、RTMP推流和推流控制。安装过程中,因为首次使用ubox仓库,所以yum会先导入ubox仓库的公钥。
文章版权归作者所有,未经允许请勿转载,若此文章存在违规行为,您可以联系管理员删除。
转载请注明本文地址:https://www.ucloud.cn/yun/126869.html

摘要:安装指南安装指南安装指南软件支持支持待支持目前推流仅支持像素格式,启动前需先使用把摄像头设置为查看摄像头是否支持若支持则将摄像头设置为安装创建挂载日志目录安 ubox-videocontroller 安装指南软件支持 x86arm64支持待支持 目前推流仅支持 YUYV 像素格式,启动前需先使用 V4L2 把摄像头 pixelformat 设置为 YUYV查看摄像头是否支持 YUYV :v4...
摘要:概览概览本篇目录功能介绍功能介绍可靠性分析可靠性分析操作指南操作指南应用场景应用场景推流程序安装方式推流程序安装方式无人化智能盒子是基于智能硬件的一站式上云方案。 概览本篇目录1.功能介绍2.可靠性分析3.操作指南4.应用场景5.推流程序安装方式无人化智能盒子是基于智能硬件的一站式上云方案。支持以下功能:能通过 4G/5G接入Internet,同时支持双4G链路聚合,提升带宽在客观条件的极...

摘要:激活指南激活指南激活指南支付成功后生成资源,此时资源在线状态显示为未激活状态。将已获取的资源提供给商务对接人员,完成盒子的激活流程。 激活指南支付成功后生成资源ID,此时资源在线状态显示为 未激活 状态。将已获取的资源ID提供给商务对接人员,完成盒子的激活流程。资源在线状态显示离线或具体在线信息时,则盒子已完成激活流程。
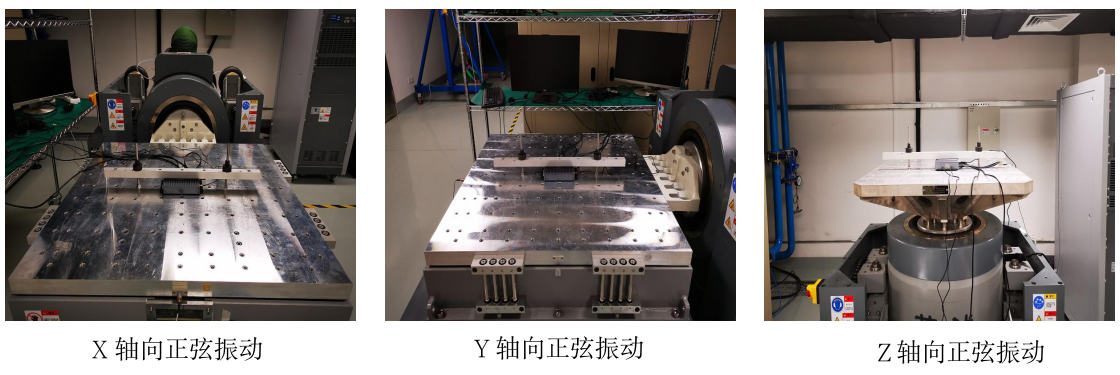
摘要:正弦振动以模拟旋转脉动震荡所产生的振动以及产品结构共振频率分析和共振点驻留验证为主。数据分析振动实验室在地下二层,网络信号不好,整个测试过程中,中国移动物联网卡信号稳定在格,中国电信物联网卡信号稳定在两格。模组保持稳定连接,通信正常。 正弦振动测试本篇目录振动数据分析信号数据分析:综合分析:实验目的:模拟产品在运输、安装及使用环境下所遭遇到的各种振动环境影响,用来确定产品是否能承受各种环境振...
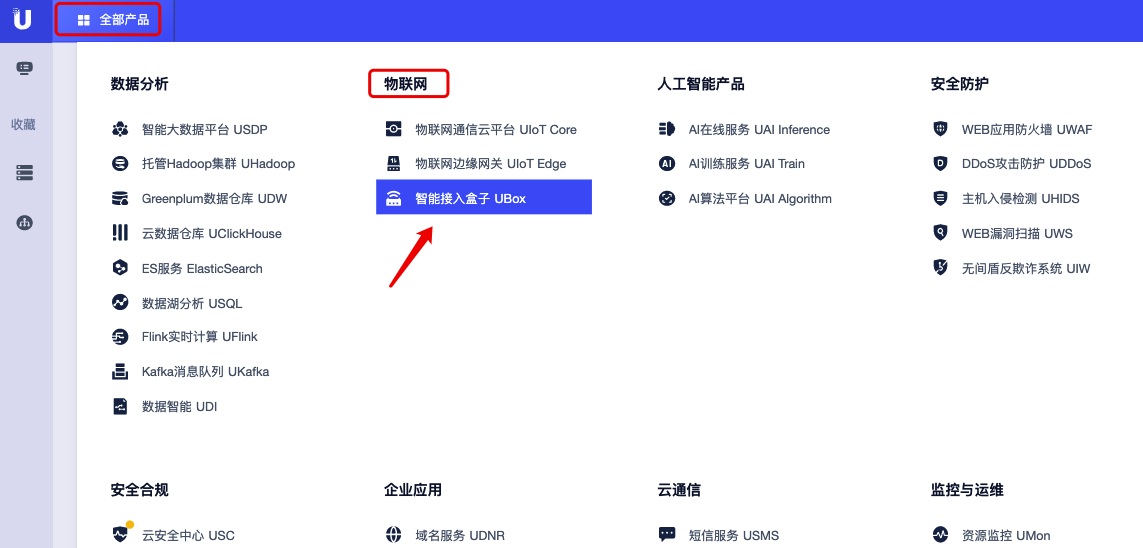
摘要:如何查询是否双卡如何查询是否双卡如何查询是否双卡方法一控制台页面查看方法一控制台页面查看登陆控制台,进入无人化智能盒子页面。 如何查询是否双卡方法一:控制台页面查看1.登陆控制台 https://console.ucloud.cn/ ,进入无人化智能盒子页面。2.全部产品—物联网—无人化智能盒子3.查看对应ID的无人化智能盒子双卡在线状态方法二:PC端查看关闭PC网络PC直连无人化智能盒子L...

阅读 1257·2025-02-07 13:29
阅读 971·2024-11-07 18:25
阅读 131436·2024-02-01 10:43
阅读 1189·2024-01-31 14:58
阅读 1117·2024-01-31 14:54
阅读 83508·2024-01-29 17:11
阅读 3796·2024-01-25 14:55
阅读 2357·2023-06-02 13:36

