
摘要:我们在协助某客户排查一个文件存储的性能时发现,其使用的训练性能和硬件的能力有很大的差距后面内容有具体性能对比数据。但直接缓存数据在集群规模上升之后肯定是不现实的,我们初步只缓存各个训练文件的句柄信息,以降低元数据访问开销。
我们在协助某AI客户排查一个UFS文件存储的性能case时发现,其使用的Pytorch训练IO性能和硬件的IO能力有很大的差距(后面内容有具体性能对比数据)。
让我们感到困惑的是: UFS文件存储,我们使用fio自测可以达到单实例最低10Gbps带宽、IOPS也可达到2w以上。该AI客户在高IOPS要求的AI单机小模型训练场景下,或者之前使用MXNet、TensorFlow框架时,IO都能跑到UFS理论性能,甚至在大型分布式训练场景中,UFS也可以完全胜任。
于是我们开启了和客户的一次深度联合排查。
基于上述情况,首先考虑是不是使用Pytorch的姿势不对?参考网上提到经验,客户调整batch_size、Dataloader等参数。
Batch_size
默认batch_size为256,根据内存和显存配置尝试更改batch_size大小,让一次读取数据更多,发现实际对效率没有提升。通过分析是由于batch_size设置与数据读取逻辑没有直接关系,IO始终会保留单队列与后端交互,不会降低网络交互上的整体延时(因为用的是UFS文件存储,后面会讲到为什么用)。
Pytorch Dataloader
Pytorch框架dataloader的worker负责数据的读取和加载、分配。通过batch_sampler将batch数据分配给对应的worker,由worker从磁盘读取数据并加载数据到内存,dataloader从内存中读取相应batch做迭代训练。这里尝试调整了worker_num参数为CPU核数或倍数,发现提升有限,反而内存和CPU的开销提升了不少,整体加重了训练设备的负担,通过 worker加载数据时的网络开销并不会降低,与本地SSD盘差距依然存在。
这个也不难理解,后面用strace排查的时候,看到CPU更多的时候在等待。
所以:从目前信息来看,调整Pytorch框架参数对性能几乎没有影响。
在客户调整参数的同时,我们也使用了三种存储做验证,来看这里是否存在性能差异、差异到底有多大。在三种存储产品上放上同样的数据集:
测试结果,如下图:

注:SSHFS基于X86物理机(32核/64G/480G SSD*6 raid10)搭建,网络25Gbps
结论:通过对存储性能实测, UFS文件存储较本地盘、单机SSHFS性能差距较大。
为什么会选用这两种存储(SSHFS和本地SSD)做UFS性能对比?
当前主流存储产品的选型上分为两类:自建SSHFS/NFS或采用第三方NAS服务(类似UFS产品),个别场景中也会将需要的数据下载到本地SSD盘做训练。传统SSD本地盘拥有极低的IO延时,一个IO请求处理基本会在us级别完成,针对越小的文件,IO性能越明显。受限于单台物理机配置,无法扩容,数据基本 “即用即弃”。而数据是否安全也只能依赖磁盘的稳定性,一旦发生故障,数据恢复难度大。但是鉴于本地盘的优势,一般也会用作一些较小模型的训练,单次训练任务在较短时间即可完成,即使硬件故障或者数据丢失导致训练中断,对业务影响通常较小。
用户通常会使用SSD物理机自建SSHFS/NFS共享文件存储,数据IO会通过以太网络,较本地盘网络上的开销从us级到ms级,但基本可以满足大部分业务需求。但用户需要在日常使用中同时维护硬件和软件的稳定性,并且单台物理机有存储上限,如果部署多节点或分布式文件系统也会导致更大运维精力投入。
我们把前面结论放到一起看:
3、Pytorch+UFS的场景下, UFS文件存储较本地SSD盘、单机SSHFS性能差距大。
结合以上几点信息并与用户确认后的明确结论:
UFS结合非Pytorch框架使用没有性能瓶颈, Pytorch框架下用本地SSD盘没有性能瓶颈,用SSHFS性能可接受。那原因就很明显了,就是Pytorch+UFS文件存储这个组合存在IO性能问题。
看到这里,大家可能会有个疑问:是不是不用UFS,用本地盘就解决了?
答案是不行,原因是训练所需的数据总量很大,很容易超过了单机的物理介质容量,另外也出于数据安全考虑,存放单机有丢失风险,而UFS是三副本的分布式存储系统,并且UFS可以提供更弹性的IO性能。
根据以上的信息快速排查3个结论,基本上可以判断出: Pytorch在读UFS数据过程中,文件读取逻辑或者UFS存储IO耗时导致。于是我们通过strace观察Pytorch读取数据整体流程:
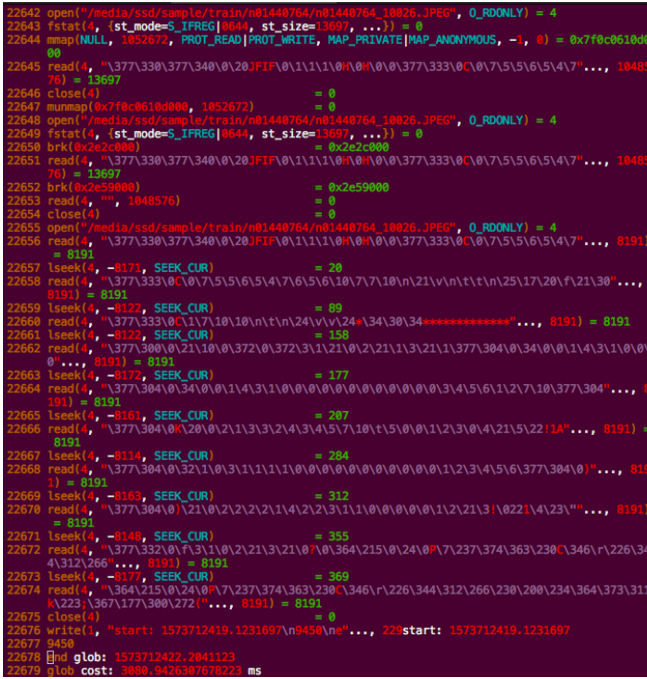
通过strace发现,CV2方式读取UFS里的文件(NFSV4协议)有很多次SEEK动作,即便是单个小文件的读取也会“分片”读取,从而导致了多次不必要的IO读取动作,而最耗时的则是网络,从而导致整体耗时成倍增长。这也是符合我们的猜测。
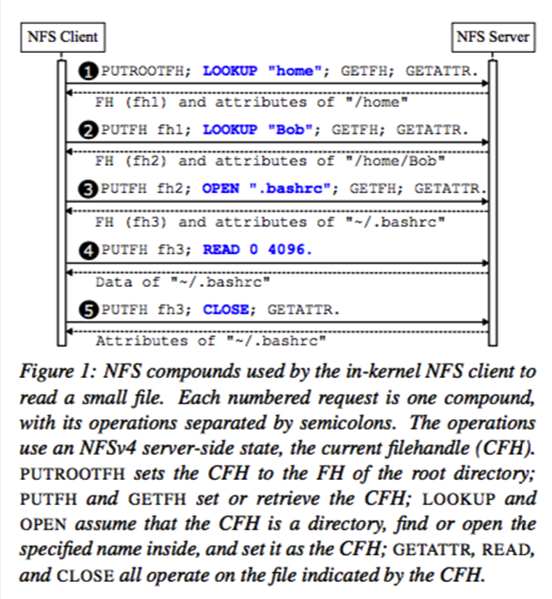
简单介绍一下NFS协议特点:
NAS所有的IO都需要经过以太网,一般局域网内延时在1ms以内。以NFS数据交互为例,通过图中可以看出,针对一次完整的小文件IO操作将涉及元数据查询、数据传输等至少5次网络交互,每次交互都会涉及到client与server集群的一个TTL,其实这样的交互逻辑会存在一个问题,当单文件越小、数量越大时则延时问题将越明显,IO过程中有过多的时间消耗在网络交互,这也是NAS类存储在小文件场景下面临的经典问题。
对于UFS的架构而言,为了达到更高扩展性、更便利的维护性、更高的容灾能力,采用接入层、索引层和数据层的分层架构模式,一次IO请求会先经过接入层做负载均衡,client端再访问后端UFS索引层获取到具体文件信息,最后访问数据层获取实际文件,对于KB级别的小文件,实际在网络上的耗时比单机版NFS/SSHFS会更高。
从Pytorch框架下两种读图接口来看:CV2读取文件会“分片”进行,而PIL虽然不会“分片”读取,但是基于UFS分布式架构,一次IO会经过接入、索引、数据层,网络耗时也占比很高。我们存储同事也实际测试过这2种方法的性能差异:通过strace发现,相比OpenCV的方式,PIL的数据读取逻辑效率相对高一些。
通过对Pytorch框架接口和模块的调研,如果使用 OpenCV方式读取文件可以用2个方法, cv2.imread和cv2.imdecode。
默认一般会用cv2.imread方式,读取一个文件时会产生9次lseek和11次read,而对于图片小文件来说多次lseek和read是没有必要的。cv2.imdecode可以解决这个问题,它通过一次性将数据加载进内存,后续的图片操作需要的IO转化为内存访问即可。
两者的在系统调用上的对比如下图:

我们通过使用cv2.imdecode方式替换客户默认使用的cv2.imread方式,单个文件的总操作耗时从12ms下降到6ms。但是内存无法cache住过大的数据集,不具备任意规模数据集下的训练,但是整体读取性能还是提升明显。使用cv2版本的benchmark对一个小数据集进行加载测试后的各场景耗时如下(延迟的非线性下降是因为其中包含GPU计算时间):

通过PIL方式读取单张图片的方式,Pytorch处理的平均延迟为7ms(不含IO时间),单张图片读取(含IO和元数据耗时)平均延迟为5-6ms,此性能水平还有优化空间。
由于训练过程会进行很多个epoch的迭代,而每次迭代都会进行数据的读取,这部分操作从多次训练任务上来看是重复的,如果在训练时由本地内存做一些缓存策略,对性能应该有提升。但直接缓存数据在集群规模上升之后肯定是不现实的,我们初步只缓存各个训练文件的句柄信息,以降低元数据访问开销。
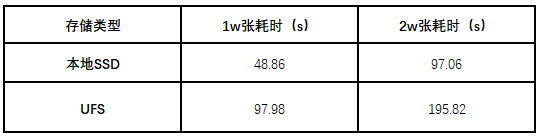
我们修改了Pytorch的dataloader实现,通过本地内存cache住训练需要使用的文件句柄,可以避免每次都尝试做open操作。测试后发现1w张图片通过100次迭代训练后发现,单次迭代的耗时已经基本和本地SSD持平。但是当数据集过大,内存同样无法cache住所有元数据,所以使用场景相对有限,依然不具备在大规模数据集下的训练伸缩性。

以上client端的优化效果比较明显,但是客户业务侧需要更改少量训练代码,最主要是client端无法满足较大数据量的缓存,应用场景有限,我们继续从server端优化,尽量降低整个链路上的交互频次。
正常IO请求通过负载均衡到达索引层时,会先经过索引接入server,然后到索引数据server。考虑到训练场景具有目录访问的空间局部性,我们决定增强元数据预取的功能。通过客户请求的文件,引入该文件及相应目录下所有文件的元数据,并预取到索引接入server,后续的请求将命中缓存,从而减少与索引数据server的交互,在IO请求到达索引层的第一步即可获取到对应元数据,从而降低从索引数据server进行查询的开销。
经过这次优化之后,元数据操作的延迟较最初能够下降一倍以上,在客户端不做更改的情况下,读取小文件性能已达到本地SSD盘的50%。看来单单优化server端还是无法满足预期,通过执行Pytorch的benchmark程序,我们得到UFS和本地SSD盘在整个数据读取耗时。
此时很容易想到一个问题:非Pytorch框架在使用UFS做训练集存储时,为什么使用中没有遇到IO性能瓶颈?
通过调研其他框架的逻辑发现:无论是MXNet的rec文件,Caffe的LMDB,还是TensorFlow的npy文件,都是在训练前将大量图片小文件转化为特定的数据集格式,所以使用UFS在存储网络交互更少,相对Pytorch直接读取目录小文件的方式,避免了大部分网络上的耗时。这个区别在优化时给了我们很大的启示,将目录树级别小文件转化成一个特定的数据集存储,在读取数据做训练时将IO发挥出最大性能优势。
基于其他训练框架数据集的共性功能,我们UFS存储团队赶紧开工,几天开发了针对Pytorch框架下的数据集转换工具,将小文件数据集转化为UFS大文件数据集并对各个小文件信息建立索引记录到index文件,通过index文件中索引偏移量可随机读取文件,而整个index文件在训练任务启动时一次性加载到本地内存,这样就将大量小文件场景下的频繁访问元数据的开销完全去除了,只剩下数据IO的开销。该工具后续也可直接应用于其他AI类客户的训练业务。
工具的使用很简单,只涉及到两步:
20行:新增from my_dataloader import *
205行:train_dataset = datasets.ImageFolder改为train_dataset = MyImageFolder
224行:datasets.ImageFolder改为MyImageFolder
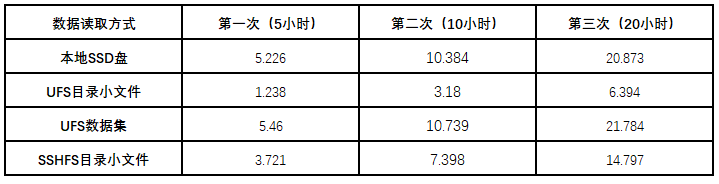
通过github上Pytorch测试demo对imagenet数据集进行5、10、20小时模拟训练,分别读取不同存储中的数据,具体看下IO对整体训练速度的影响。(数据单位:完成的epoch的个数)
测试条件:
GPU服务器:P404物理机,48核256G,数据盘800G6 SATA SSD RAID10
SSHFS:X86物理机32核/64G,数据盘480G*6 SATA SSD RAID10
Demo:https://github.com/pytorch/examples/tree/master/imagenet
数据集:总大小148GB、图片文件数量120w以上
通过实际结果可以看出: UFS数据集方式效率已经达到甚至超过本地SSD磁盘的效果。而UFS数据集转化方式,客户端内存中只有少量目录结构元数据缓存,在100TB数据的体量下,元数据小于10MB,可以满足任意数据规模,对于客户业务上的硬件使用无影响。
针对Pytorch小文件训练场景,UFS通过多次优化,吞吐性能已得到极大提升,并且在后续产品规划中,我们也会结合现有RDMA网络、SPDK等存储相关技术进行持续优化。详细请访问:https://docs.ucloud.cn/storage_cdn/ufs/overview
本文作者:UCloud 解决方案架构师 马杰
欢迎各位与我们交流有关云计算的一切~~~
文章版权归作者所有,未经允许请勿转载,若此文章存在违规行为,您可以联系管理员删除。
转载请注明本文地址:https://www.ucloud.cn/yun/126012.html
摘要:宋体是一款自主研发的分布式文件存储产品,此前已推出容量型版本。宋体性能的提升不仅仅是因为存储介质的升级,更有架构层面的改进,本文将从协议索引存储设计等几方面来详细介绍性能型升级改造的技术细节。UFS (UCloud File System) 是一款 UCloud 自主研发的分布式文件存储产品,此前已推出容量型 UFS 版本。UFS 以其弹性在线扩容、稳定可靠的特点,为众多公有云、物理云、托管...

摘要:概览概览产品简介什么是训练服务交互式训练分布式训练分布式训练简介分布式训练分布式训练产品优势产品更新记录产品定价快速上手开始使用快速上手案例介绍环境准备创建镜像仓库 概览产品简介什么是AI训练服务交互式训练分布式训练分布式训练简介TensorFlow分布式训练MXNet分布式训练产品优势产品更新记录产品定价快速上手开始使用UAI-Train快速上手-MNIST案例MNIST 介绍环境准备创建...
摘要:第一个深度学习框架该怎么选对于初学者而言一直是个头疼的问题。简介和是颇受数据科学家欢迎的深度学习开源框架。就训练速度而言,胜过对比总结和都是深度学习框架初学者非常棒的选择。 「第一个深度学习框架该怎么选」对于初学者而言一直是个头疼的问题。本文中,来自 deepsense.ai 的研究员给出了他们在高级框架上的答案。在 Keras 与 PyTorch 的对比中,作者还给出了相同神经网络在不同框...
摘要:幸运的是,这些正是深度学习所需的计算类型。几乎可以肯定,英伟达是目前执行深度学习任务较好的选择。今年夏天,发布了平台提供深度学习支持。该工具适用于主流深度学习库如和。因为的简洁和强大的软件包扩展体系,它目前是深度学习中最常见的语言。 深度学习初学者经常会问到这些问题:开发深度学习系统,我们需要什么样的计算机?为什么绝大多数人会推荐英伟达 GPU?对于初学者而言哪种深度学习框架是较好的?如何将...

阅读 3644·2023-04-25 20:09
阅读 3809·2022-06-28 19:00
阅读 3171·2022-06-28 19:00
阅读 3205·2022-06-28 19:00
阅读 3297·2022-06-28 19:00
阅读 2964·2022-06-28 19:00
阅读 3190·2022-06-28 19:00
阅读 2748·2022-06-28 19:00





